姿态传感器MRU介绍及案例分享
来源: Frank 发布时间: 2018-04-04MRU 运动参考单元
MRU 运动参考单元(姿态传感器)用于在水上或者水下的俯仰、滚转、前进、后退、升降等运动而设计(六个自由度),在静态、动态不同工况下都可以满足其精确测量。
运动参考单元MRU的应用环境集中在船舶、水下机器人(ROV/AUV)、水下施工辅助、水上运维机械等领域上,在陆地上的悬空作业中也有应用。
技术参数:
| 参数 | 规 格 |
|---|---|
| 尺寸 | 直径:89mm;长:152mm |
| 舱室材料 | 氧化铝合金,带安装架(可选聚甲醛树脂及船用青铜材料) |
| 重量 | 空气中1.2kg(铝);水中0.3kg(水中) |
| 耐压 |
电镀氧化铝:3300m 船用青铜:2500m 聚甲醛树脂:900m |
| 电源 | 7VDC~36VDC;极性反接保护 |
| 连接 | RS-232,RS485或RS422 |
| 接口 | Subconn Micro系列或者3H 4针LSG-4-BCL接口 |
| 角速率范围 | ±150°/s或±300°/s |
| 加速度范围 | ±5g |
| 磁力仪范围 | ±2.5gauss |
| 定向精度 |
静态条件下,标准为:±0.25° 动态条件下,标准为:±0.5° 注意:方向和起伏的精确度取决于传感器的用途和环境 |
| 定向分辨率 | 0.1°大多数情况下和理想的磁场条件 |
|
俯仰/滚动精度(高分辨率) |
静态条件下,标准为:±0.1° 动态条件下,标准为:±0.1° 注意:方向和起伏的精度取决于传感器的用途和环境 |
| 俯仰/滚动精度(低分辨率) | ±0.5°大多数情况下和理想的磁场条件 |
| 起伏精度 | 起伏低于1m时,5cm;起伏高于1m时,5% |
| 起伏分辨率 | 1cm |
| 可选传感器 | 电导率/压力/温度 |
运动参考单元MRU产品特点:
Ø 数据传输稳定、精度高、可靠性高
Ø 在静态与动态条件下对姿态数据进行补偿,提高数据的可靠性
Ø 数据输出格式格式(规则)可自定
Ø 便捷式的安装方式,对安装环境要求低
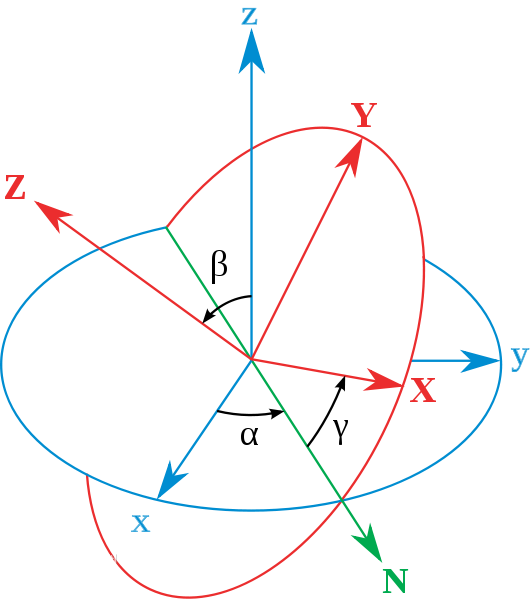
姿态数据(六个自由度)示例:
应用案例:
MRU运动参考单元 —姿态角传感器—船舶姿态监测
船舶的航行环境大致分为江湖河与海洋,江湖河的航行环境要优于海洋,但这并不代表江湖河的航行环境全面优越,航道的浅、窄就是江湖河不可避免的非理想航行环境。以下将介绍MRU在船舶于两大航行环境中的应用。
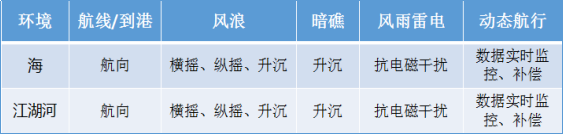
海洋航行环境:飓风、巨浪、暗礁、潮汐、海流、远距等


江湖河航行环境:航道浅、航道窄、航道曲折、船舶密度大等


MRU的安装示意: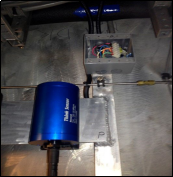

技术解决说明:
在船舶行业过程中,首要必须确认其航行姿态是在预设航线、航向上前行,如出现偏离则需要实时调整,而此时的调整姿态依据至关重要。MRU-LT-TSR-100能够精确的捕捉到姿态实时数据,对姿态实时数据还能够作出数据补偿,以提高数据的精准性。
船舶通用性MRU数据示例:
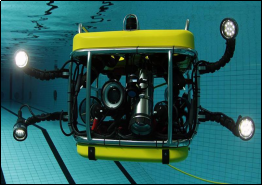
MRU运动参考单元 ——水下机器人(ROV/AUV)
水下机器人在水下作业中的应用越来越广泛,于铺设管线、海底考察、数据收集、钻井支援、海底施工,水下设备维护与维修、救援等领域中得到大量的应用。
水下机器人在潜行过程中对于姿态的监测需实时监控,水下航行环境相比水上航向环境更恶劣,所需监控参数也更复杂,其中翻滚参数就是水下航行特有参数之一。
水下机器人示例:
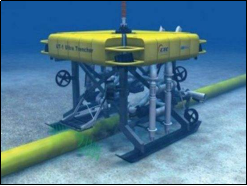
水下线缆铺设机器人MRU数据示例:

MRU运动参考单元 —— 在安装吊机上的使用
吊机安装设备在安装过程中,设备的衔接点受到外部环境的影响,难以迅速的找出衔接的基准点,安装缓慢、基准点的错误对于精密仪器更是致命。使用MRU对姿态实时检测,为调整姿态提供实时依据数值。
系统示意图:
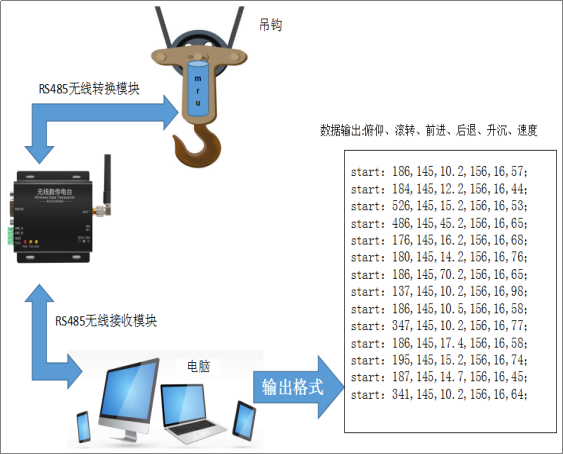
系统流程说明:
将MRU 安装在吊钩或者抓手上,采用无线传输模块进行数据传输,电脑或手机等无线接收数据,软件部分对数据的进行解析输出,输出结构可由人员实时反馈给操作人员,亦可集成到操作室操作平台进行屏幕显示,操作人员根据反馈数据做出实时响应。